Former Chairman and Professor
Department of Physics, Bangalore University
President of Karnataka Physics Association








Nowadays drones have become very common and popular all over the world. They have been used as flying toys, flying video cameras, small goods transporters and carriers of weapons in wars, just to name a few. Any aircraft or flying machine operated without a human pilot is called an unmanned aerial vehicle (UAV) or a drone, in common parlance. They can be guided autonomously or remotely by a human operator using onboard computers or robots. They can be of fixed wings type or spinning propeller type. The science of fixed wing drones is similar to that of airplanes. Hence, here we shall consider here the working principles of drones that make use of two or more spinning blades or propellers. The number of propellers can vary from two to eight. Higher number of propellers improve the stability of drones and load-carrying capacity but such drones need more battery power to drive the motors for good performance. In principle, one can have drones with only two propellers. They are called bicopters. Drones with three propellers are called triple copters. However, both are more complicated to operate and stabilize - hence, not very common. The most common configuration, the one involving four propellers is called a quadcopter (figure 1). Let us consider their operation in some detail.

Figure
1. A quadcopter
The first quadcopter drone was invented by the Breguet brothers, Jacques and Louis Breguet, along with Professor Charles Richet in 1907. In the beginning they were impossible to steer and required four men for stabilization during their brief hover of just two feet off the ground! Since then, drones have come a long way!
A typical
quadcopter has four propellors at four corners of a sturdy frame. The speed and
direction of rotation of each propeller are independently controlled for
balance and movement of the drone. In a traditional quadcopter, all the four
rotors are placed at an equal distance from each other.
To maintain the
balance of the system, one pair of rotors rotates in a clockwise direction
while the other pair rotates in an anticlockwise direction. To move up or hover
at a particular height, all rotors should run at high speed. By changing the
speed of selected rotors, drones can be moved forward, backwards, and
side-to-side as discussed below.
Quadcopter
Dynamics
One
wonders how such a device can fly making all kinds of maneuverers, when one does
not see any wings, any tail, and any rudder that we commonly associate with an
airplane. How does it manage to go forward and backwards; move sideways and
turn about a vertical axis passing through its center are some of the common questions one tends to ask. Let us see how we
can find answers to such questions using basic physical principles.
The four specially shaped spinning blades (or propellers) at the corners are capable of spinning at different rates individually by a central control system. All of them do not spin in the same direction – if that were to happen it would cause the entire body of the drone to spin constantly in the opposite direction-following the law of conservation of angular momentum - something that we do not want. Hence, diagonally opposite blades along each diagonal (like 1 and 3) spin in one direction, while those along the other diagonal (like 2 and 4) spin in the opposite sense as shown in figure 2.

Such
an arrangement leads to cancellation of the net torque on the body of the drone
– hence enabling the drone to move up or down; left or right without unwanted
rotation.
If
we want the drone to move up vertically, we just raise the spinning rates of
all the four blades simultaneously. Then, the lifting force - known as thrust
that is developed due to the rapid displacement of air mass downwards (again
following Newton’s third law for forces) counteracts the weight of the drone;
and if the thrust exceeds the weight, the drone climbs up vertically. In the
special case of the thrust balancing the weight, the drone simply stays at one
position. Such a motion is called hovering. If one wishes to bring down the
drone, the spinning rate of the blades is gradually reduced. Then the vehicle
slowly comes down and touches the ground without any damage. It is believed
that thrust is proportional to the square of the spin rates. The thrust is also
proportional to the density of the air and the surface area of the blades. The
blades, in advanced quadcopters, are specially designed to resemble airplane
wings with curved top surfaces to enable greater lifting capacity.
Supposing we want the drone to move forward, then the two blades on the back side (opposite side to the direction of motion), marked with green circles (figure 3), are spun at a greater speed than those in the forward direction, marked with yellow circles in the figure. Following Newton’s third law, the backside would receive a greater upward force than the front side. The net result is lifting up of the back portion compared to the front part. Please note that there will always be a resistive force, called drag, due to the air medium. It has to be overcome for the motion to take place.

Figure 3. Forward and backward movements
Therefore, a component of the total force acting horizontally along the forward direction on the body emerges in addition to the vertical force component balancing the weight. This makes the drone move forward – with the forward edge slightly dipped compared to the backward edge! This can be noticed on a slowly flying quadcopter. Alternatively, a drone can be made to move backward from its hovering position, if the front blades are spun faster than the rear ones as shown in the right part of figure 3. This is a simple, but ingenious, idea employed for moving a quadcopter horizontally.
Similarly,
movements to the left and right can be achieved by differentially spinning the
right or left pair of blades. The speed of the linear motion depends on the
difference in the spinning rates of the left and right pairs of blades over and
above the hovering spin rates.
We also see a drone turning clockwise or anticlockwise about a vertical axis in addition to linear motions discussed above. Such turnings are called yaw motions. How are such turnings achieved? Let us say the blades with green circled blades are spinning faster in the anticlockwise manner while those coloured yellow are spinning slowly in the clockwise manner (figure 4). Remember that such diagonal pairing of blades is required for stability, as discussed earlier. Let us say we enhance the spinning rates of the green blades compared to the rates of the yellow ones, leading to a net angular motion of the blades in the anticlockwise manner. Hence, the body of the drone starts spinning or turning in the clockwise manner- again following Newton’s third law for the conservation of angular momentum. It is amazing to realise that the spin rates control all possible motions of the drone! Alternatively, if the green-coloured blades are spun at a higher rate in the clockwise manner than the slower yellow blades turning in the anti clockwise manner, the body of the drone turns in the anticlockwise manner as illustrated in the right half of the same figure.

Figure 4. Yaw motions to the right and left
The main parts of a quadcopter
The central part of the drone houses batteries, control systems, motors, communication units, cameras etc. depending on the model. They are shown in Figure 5.
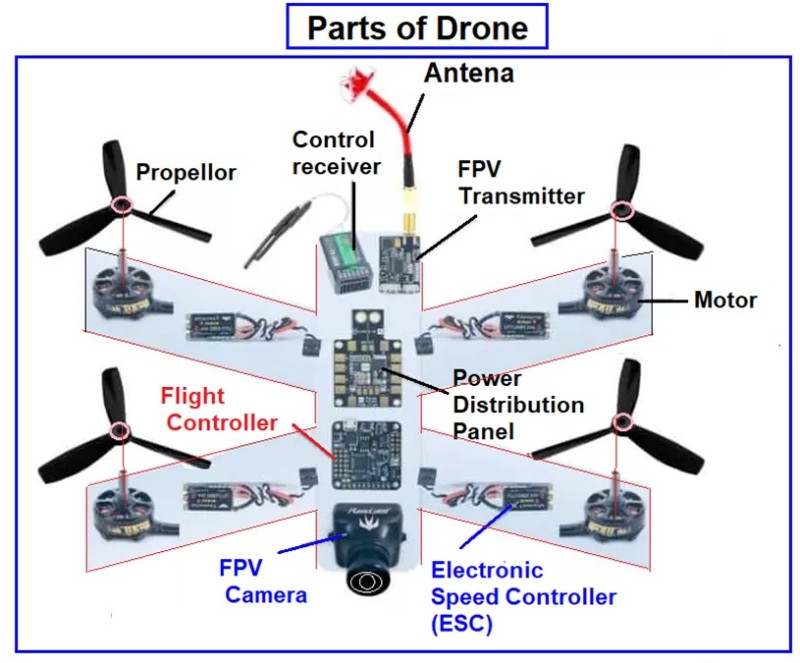
Figure 5. Parts of a Drone
The Frame of a drone should have
sufficient strength to hold the propellers, motors, landing gear and cameras.
It should be sturdy and offer less aerodynamic resistance.
The speed and
load lifting ability of a drone depends on the shape, size, and number of propellers.
Long propellers create huge thrust to carry heavy loads at a low speed and are less
sensitive to changes in the speed of rotation. Shorter propellers can
carry only lesser loads. They change rotation speeds quickly and require a high
speed for more thrust.
Brushless and brushed type motors can be used
for drones. A brushed motor is less expensive and useful for small-sized drones.
Brushless type motors are powerful and energy very efficient. But they need
Electronic Speed Controller
(ESC) to control their speed. These brushless motors are widely used in racing
freestyle drones, traffic surveys and aerial photography drones.
Electronic
Speed Controller is used to connect the on- board battery to the
electric motor for the power supply. It converts the signal from the flight
controller to the revolution per minute (RPM) of motor.
Flight
Controller (FC) is the computer processor which
manages the balance and telecommunication controls using different transmitters.
Sensors are located in this unit for the accelerometer, barometer,
magnetometer, gyroscope and GPS units. The distance measurement can be carried
out by an ultrasound sensor.
A high-power providing rechargeable
Lithium Polymer (LiPo) battery is used in most drones. When the pilot or
autonomous system gives the drone a command, the flight controller sends
signals to the motors to spin the propellers at the desired rates.
A digital
camera records and stores data following the given instructions. It can also
transmit the data to the drone operator in real time.
Of
course, there are very many smaller parts and variations over this basic quadcopter
design, such as those with greater number arms and those with more number of
specially crafted blades etc.
In conclusion,
it is nice to understand how manipulating the spinning rates of blades leads to
drone motion at the basic level!
1. Working Principle and Components of Drone. https://cfdflowengineering.com/working-principle-and-components-of-drone/
2. How do drones work? https://aonic.com/my/blogs-drone-technology/how-do-drones-work/
3. Principles of flight with drones https://www.bluewhalemedia.co.uk/principles-of-flight-drones/

Former Chairman and Professor
Department of Physics, Bangalore University
President of Karnataka Physics Association
